皆さんこんにちは.マリンです.
直近の投稿二つがとってもテキトーな感じになってしまったので,ここはひとつ少しばかり理系っぽい話をしてみたいと思います.
実は私,夏に院試に縛り付けられていた反動でしょうか,最近やりたいことだらけで,卒論のほかに独学でいろいろ勉強しております(勉強といっても大それたものではありませんが).
そのうちの一つが ズバリ…カルマンフィルタ!!
カルマンフィルタとは?
カルマンといってもカルマン渦のカルマンとはちょっと違います.(カルマン渦はハンガリーの航空工学の父”セオドア・フォン・カルマン“にちなみます)
カルマンフィルタはアメリカの工学者”ルドルフ・カルマン”によって提唱されました.

ロボットやドローンの制御を学ぶ人ならおそらく避けては通れないカルマンフィルタですが,航空宇宙のつながりは深く,歴史をさかのぼればアポロ計画において軌道の推定にも用いられた技術です.現代では,GNSSなどにおいて衛星と受信機間のアンビギュイティを推定する手法としても用いられています.
私も絶賛勉強中なのですが,ざっくりいうとノイズがガウス分布であることを仮定したうえで事前推定値を観測値を用いて補正することがカルマンフィルタの役割です.もっと言ってしまえば観測値から直接知ることのできないシステム内部の状態を推定するベイズフィルタの一種です.
カルマンフィルタがすごいのは,理論の提唱から60年近くが過ぎようとしているにも関わらず時代の先端技術の基礎を支えているところ.まさに縁の下の力持ち.
というわけで,私が参考書として使っている本を載せておきます.

本書では題名の通りカルマンフィルタが基礎から解説されており,学部で制御工学を学んだことがあれば割とサクサク読み進めるとおもいます.(私も何とか半分くらいまで読み進めました)
カルマンフィルタを学びたい人,オススメです.
研究室に転がっていた夢の技術の出発点
プロフィールにも書きましたが,元をたどれば私が理系に進もうと思ったきっかけは自動運転の技術力向上を目的としたロボットカーによるレース「DARPAグランド・チャレンジ」に影響を受けたから.

Stanford Racing Team
ロボットカーといっても写真のような市販車を改造したものもあります.無人の車が荒野を進んでいく姿に当時小学生だった私は途轍もなくロマンを感じましたね.「将来はこんなことやってみたい」漠然とそう思ったものです.ですが小学生の私に自己位置推定手法など理解できるはずもなく,「夢のような技術」として私の中で一度終わってしまいました.
そこから十数年後,研究室に転がっている一冊の本を発見.
ワイ「かるまんふぃるた?ふーん」
その本こそ今私の読んでいる「カルマンフィルタの基礎」であり,ロボットなどの自己位置推定の基礎となる理論だったのです.
そりゃ当然読み込みますわな.久々に学ぶ楽しさに浸っております.
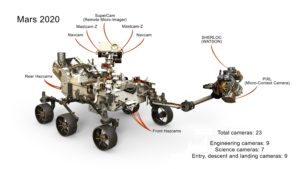
そういえば最近 Mars 2020 Rover の着陸地点が決まったみたいですね!東大航空宇宙工学出身の方がシステムの設計を担当してるというのですからこれは注目度大です.さらにこのローバー,自動運転のアルゴリズムを搭載しているようです.
ローバーも自動運転の時代が来るのでしょうか.地上から抽象的なコマンドのみを送信すればローバーが自分で考えて行動してくれるようになるとしたら,惑星探査の効率は上がり,地上の負担は減って宇宙の開拓がより一層加速しそうですね.
自分の今学んでいる理論の延長にこんなにもロマンの塊のようなものがあると,自然とモチベーションがあがります.
わき道にそれましたが,カルマンフィルタは宇宙でも使われていてすげぇんだぞってハナシでした.
今回はとりあえずここまで.
また興味深い理論や技術があれば紹介していこうと思います.











この記事へのコメントはありません。